2月8日(土)に、本校生徒11名が東京科学大学を訪問して、特別講義を受講してきました。講義していただいたのは、工学院教授の岩附信行先生でした。内容は、「モーター1つで動く、歩行ロボットの脚機構を創る!」です。
昨年の10月から、東京工業大学と東京医科歯科大学が統合されて、新しく「東京科学大学」に変わったことなどを含めて、大学の概要について話していただいた後に、機械工学で扱っている内容を紹介していただきました。
本題は、ロボットに使われる脚をどのように動かすのかということでした。例えば、人間の脚を考えた場合、関節が腰、膝、足首の3つあるので、単純にロボットで再現しようとすると、モーターが3つ必要になります。ところが、脚を動かすために、モーターを3つ搭載すると、どうしても重くなってしまうし、値段も高くなってしまいます。これをできるだけ少ないモーターで動かすにはどうすれば良いのか、ということを教えていただきました。

動かすために必要なモーターの数は、次の式で決まるそうです。
F(機構の自由度:モーターの数) = 3N(運動するリンク数) ー 2J(関節数)
リンク数とは、人間で例えると骨の数となるでしょうか。脚を単純化した描くときの棒の数です。
普通は、N=3、J=3なので、
F = 3×3 ー 2×3 = 3
となって、モーターが3つ必要となります。
これを、例えば、脚のパーツを5個にして、動く関節の数を7にすると、
F = 3×5 ー 2×7 = 1
となって、1つのモーターで、脚を動かすことができるそうです。さらに、同じ軸にもう一つの脚をつけて、動きをずらしてあげれば、なんと、2足歩行の脚を創ることができるのです。
説明を受けたあと、実際に模型を製作して、その動きを確認してみました。生徒11名に対して、引率教員が6名参加して、教員も熱心に模型の製作に参加してきました。
講義のあとは、生徒たちから、質問がたくさん出てきて、充実した時間を過ごすことができました。長い時間、お付き合いいただいた岩附先生に感謝申し上げます。
-

東京工業大学から、東京科学大学に変わっていました。
-

この日は、風があって、かなり寒かったです。
-

教室に入って、席に着くと、何やら工作の材料が並んでいます。
-
当日、講義を担当していただきました岩附先生より、東京科学大学の概要について、ご説明いただきました。
-
機械工学については、高校では学ぶことがないので、とても興味深いことが多かったです。
-
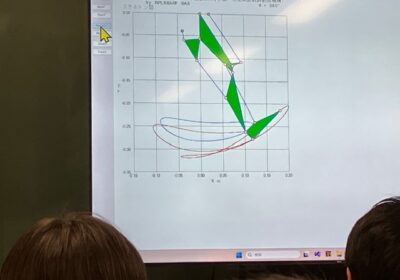
一つのモーターを使って、複雑な足の動きを再現できることに驚きました。
-
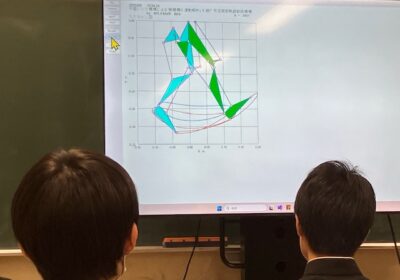
さらに、180°ずらした足をもう一つ、つければ、2足歩行が実現できます。すごい!
-
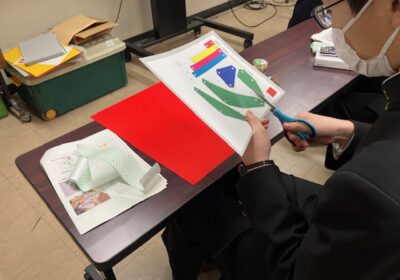
実際に、パーツを切り抜いて、足の動きを再現していきます。
-

こんな感じで、パーツを切り抜きました。
-
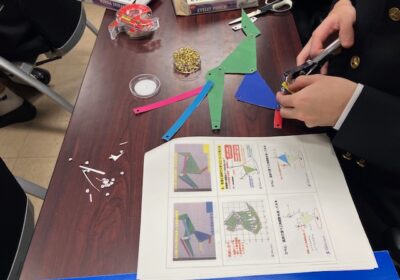
パーツを切り抜いたら、穴を空けて、ハトメでパーツ同士をつなげていきます。ハトメパンチ、ちょっと懐かしかったです。
-

全て、連結されるとこのようになります。
-
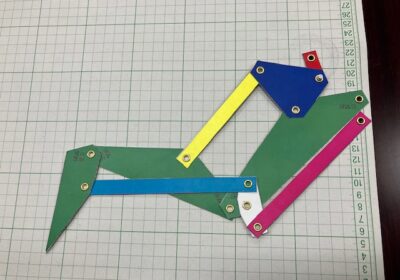
これを台紙に固定したら、完成です。
-
複雑な動きをさせるためには、モーターをたくさん付ければ良いのですが、それでは重たくなってしまいます。モーター1個で、動かすことができるって、素晴らしいですね。
-

帰りには、岩附先生に生徒たちが色々なことを質問していました。
